Dans ce module, nous travaillerons sur un simulateur, avec comme objectif de faire marcher un robot quadrupède dans un simulateur physique.

Téléchargez l'archive quadruped.zip
Ceci est le projet initial à compléter au cours du TP guidé
Ceci est le projet initial à compléter au cours du TP guidé
L’objectif est de compléter le contenu de quadruped/control.py. Chaque étape ci-dessous vous amènera à compléter une partie du code qui vous permettra d’obtenir une marche fonctionnelle. Attention: ne touchez pas à quadruped/simulator.py
Séances
- Installation et lancement
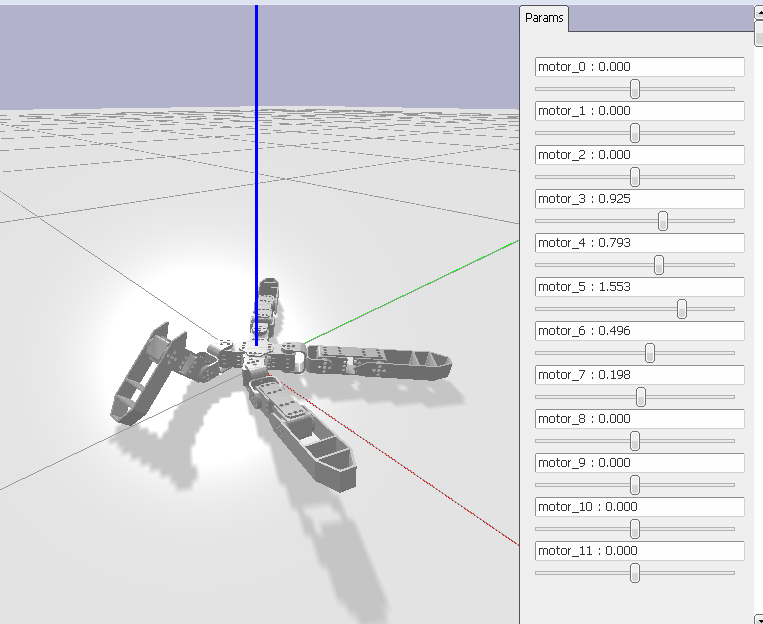
- Prise en main du simulateur
- Objectif:
python simulator.py -m sandbox - Ici vous pourrez placer le code de votre premier essai
- Objectif:
- Modèle géométrique inverse
- Objectif:
python simulator.py -m inverse - Le mode inverse sera fonctionnel
- Objectif:
- Interpolation linéaire
- Objectif:
python simulator.py -m draw - La patte du robot dessine un triangle, vous implémenterez
interpolation.py
- Objectif:
- Contrôle des quatre pattes du robot
- Objectif:
python simulator.py -m legs - Vous contrôlez l’ensemble des pattes du robot en même temps en cartésien
- Objectif:
Rendu final
L’objectif final du projet est d’utiliser les fonctions écrites précédemment pour obtenir une locomotion quadrupède.
Vous pourrez écrire ce code dans la fonction walk, et utiliser le mode:
python simulator.py -m walk
Voici les objectifs:
- Les mouvements sont conçus dans l’espace opérationnel \(x, y, z\) et utilisent le modèle géométrique inverse du robot
- Les mouvements sont “lisses”, vous utiliserez des interpolations lineéaires
- La vitesse de déplacement se basera sur les paramètres
speed_xetspeed_ydisponibles par les sliders latéraux - En bonus, vous pourrez également écouter le paramètre
speed_rotationpour gérer la rotation du robot.
 Rhoban
Rhoban
 @RhobanRobots
@RhobanRobots