Espace articulaire et espace opérationnel
Soit un robot à trois degrés de liberté:
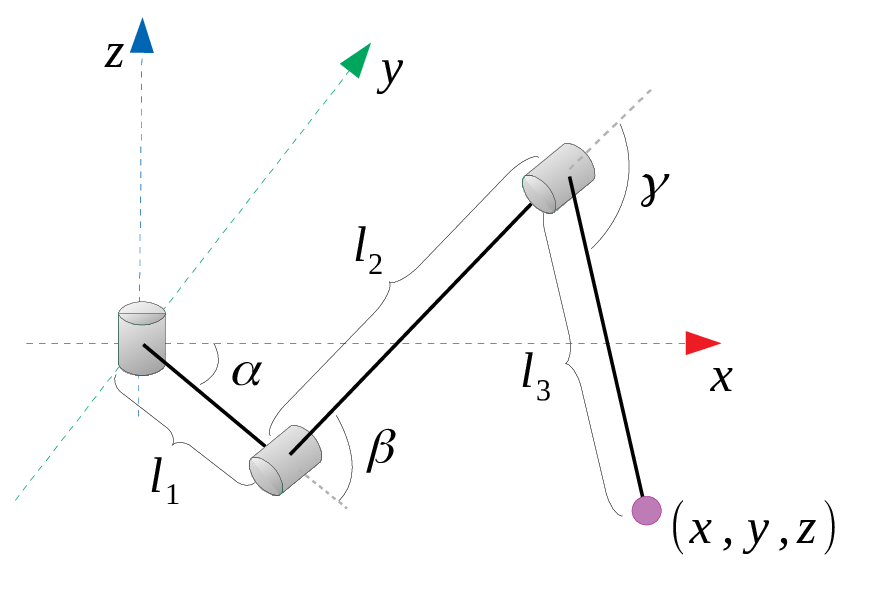
- Les coordonnées \((x, y, z)\) du bout de la patte représentent l’espace opérationnel: celui dans lequel on veut travailler
- Les coordonnées \((\alpha, \beta, \gamma)\) représentent l’espace articulaire: correspondant directement aux degrés de liberté du robot (par construction)
- Passer de l’espace articulaire à l’espace opérationnel est ce qu’on appelle le modèle géométrique direct du robot,
- Passer de l’espace opérationnel à l’espace articulaire est le modèle géométrique inverse..
Modèle géométrique direct
Le code suivant résout le problème du modèle direct. Il produit la position \(x\), \(y\), \(z\) à partir des angles moteurs:
import math
# Dimensions (mm)
l1, l2, l3 = 45, 65, 87
def forward_kinematics(alpha, beta, gamma):
"""Prend en entrée les angles moteurs et produit la position atteinte"""
xp = l1 + math.cos(beta)*l2 + math.cos(beta + gamma)*l3
yp = math.sin(beta)*l2 + math.sin(beta + gamma)*l3
x = math.cos(alpha) * xp
y = math.sin(alpha) * xp
z = yp
return x, y, z
Adaptez ce code pour implémenter le mode direct du simulateur.
Loi des cosinus
Dans un triangle quelconque, dont les côtés mesurent \(a\), \(b\) et \(c\) et les angles sont \(\alpha\), \(\beta\) et \(\gamma\), comme sur la figure suivante:

Dans ce cas, on peut utiliser les égalités suivantes:
\[c^2 = a^2 + b^2 - 2ab cos \gamma\] \[\gamma = arccos \frac{a^2 + b^2 - c^2}{2ab}\]Autrement dit, à partir du moment ou trois des six valeurs (\(a\), \(b\), \(c\), \(\alpha\), \(\beta\), \(\gamma\)) sont connues, il est possible de retrouver toutes les autres.
Modèle géométrique inverse
Il faut maintenant résoudre le problème inverse de manière analytique. Nous le ferons ensemble pendant le cours et donnerons une correction au tableau.
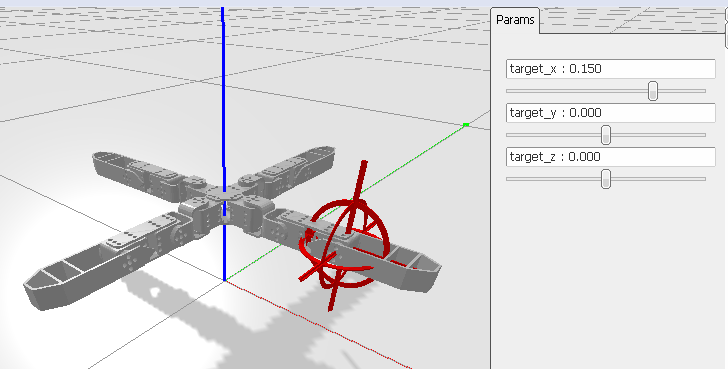
Ensuite, dans control.py, implémentez le code de la fonction inverse, de telle manière à pouvoir contrôler
le bout de la patte à l’aide des sliders lorsque vous lancez le programme avec.
python simulator.py -m inverse
La cible rouge indique la position cible. Si votre code fonctionne, le bout de la patte est donc supposé atteindre la cible.
Dans la prochaine partie, nous implémenterons l’interpolation linéaire permettant de produire des ordres plus “lisses”
 Rhoban
Rhoban
 @RhobanRobots
@RhobanRobots