Assemblage du robot
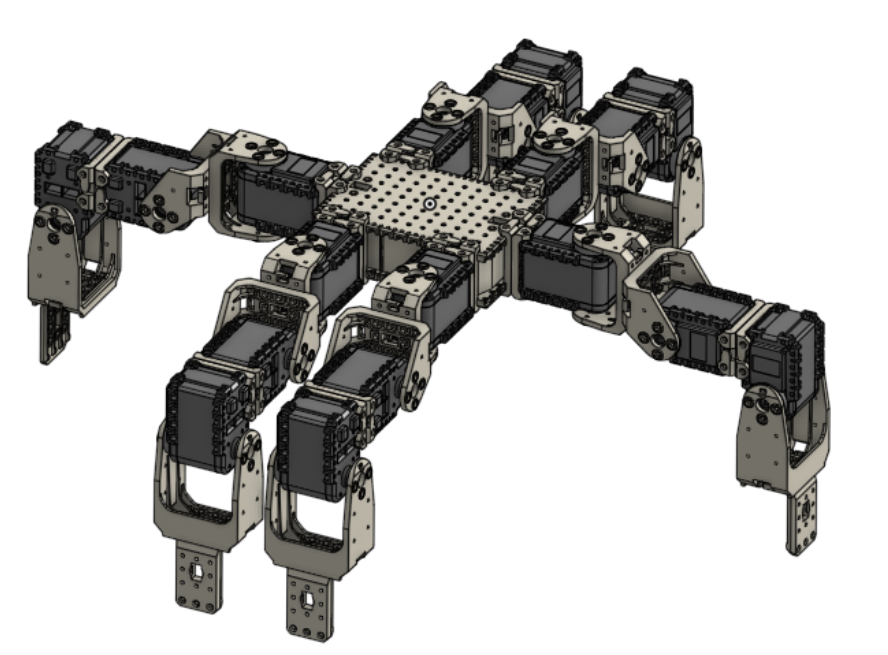
Assemblage OnShape complet
Cet assemblage vous permettra d'obtenir les dimensions nécessaires!
Cet assemblage vous permettra d'obtenir les dimensions nécessaires!
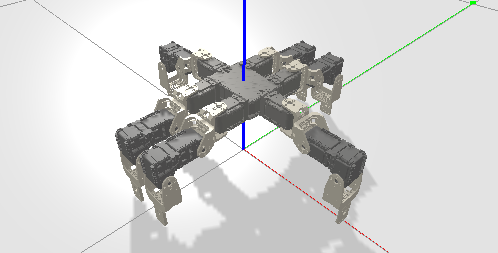
Utilisation dans le simulateur (modèle hexapod)
La variante hexapode peut être obtenue à l’aide des options suivantes:
python simulator.py -r hexapod
Tous les modes présentés dans le TP (direct, inverse, legs, draw, walk) sont également compatibles!
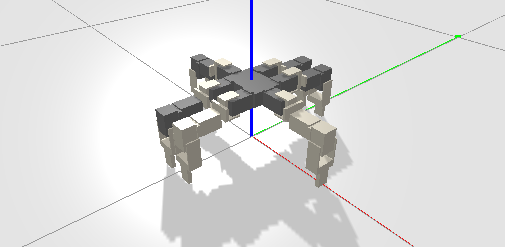
Utilisation dans le simulateur (modèle hexapod_fast)
Vous pouvez également utiliser le modèle hexapod_fast, qui ne contient que des formes pures (le rendu sera moins
beau, mais le temps de calcul sans doute meilleur):
python simulator.py -r hexapod_fast
 Rhoban
Rhoban
 @RhobanRobots
@RhobanRobots