Présentation
Un robot à deux roues veut entrer dans une maison. Pour cela, on a placé deux balises sur les murs (les points \(A\) et \(B\)). On suppose que l’on connaît la position de ces balises dans le monde \(\{w\}\), et que le robot les repère à dans son propre repère \(\{r\}\) à l’aide de capteurs.

On sait que le centre d’une porte \(P\) se trouve à une distance de 2m le long du mur entre les balises \(A\) et \(B\). L’objectif est que le robot atteigne une position cible \(X\).
Pour ce faire, on propose de paser par un point de dégagement \(P_{ext}\), puis de franchir la porte, et enfin de se rendre vers la cible \(X\).
TP
Prise en main

Lisez les instructions ci-dessous
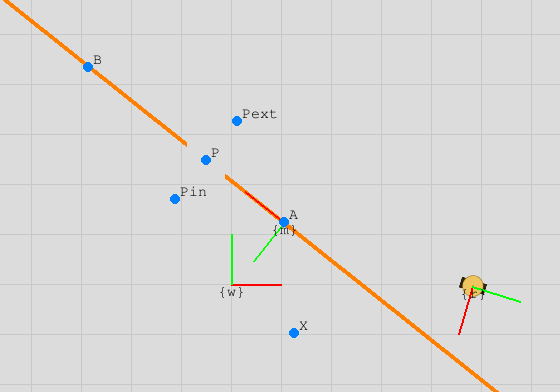
Téléchargez l’archive et exécutez sim.py, vous devriez voir une scène similaire à l’image ci-dessous.
Si vous appuyez sur ESPACE, la scène devrait se re-générer aléatoirement:
Dans le code, vous éditerez le fichier behavior.py (et uniquement celui-ci). La fonction robot_tick
de ce dernier est appellée par le simulateur, en lui fournissant les coordonnées de \(A\) et \(B\) dans le monde.
Cette fonction retourne alors la vitesse linéaire (m/s) et de rotation (rad/s) pour le robot.
Essayez de changer la ligne:
# Dans behavior.py
return 0, 0
En:
return 1, 0 # 1 m/s, 0 rad/s
Ou:
return 0, 1 # 0 m/s, 1 rad/s
Et observez l’effet dans le code.
Naviguer
Avant de nous occuper de la porte, nous allons commencer par programmer la fonction de navigation. Pour l’instant,
changez robot_tick afin qu’elle retourne:
return navigate_to(A_robot)
Et implémentez le code de navigate_to afin de produire des vitesses permettant de se rendre vers le point passé
en paramètre dans le repère du robot. Si la cible n’est pas alignée, le robot tournera sur lui-même, sinon il ira
tout droit.
Si tout se passe bien, le robot devrait alors se diriger vers le point \(A\).
Repérer le robot (et X) dans le monde
Implémentez la fonction T_frame_wall, qui prend en paramètre la position de \(A\) et de \(B\) dans un repère,
et qui utilise ces points pour construire la matrice de transformation permettant de passer du repère mur au
repère dans lequel \(A\) et \(B\) ont été repéré.
Calculez alors T_world_wall et T_robot_wall dans robot_tick.
Vous pouvez désormais calculer la position de \(X\), \(P_{in}\) et \(P_{ext}\) dans le repère robot.
Passer la porte!
Implémentez le code permettant au robot de:
- Passer par \(P_{ext}\),
- Passer par \(P_{in}\),
- Aller en \(X\).
Afin de franchir la porte.
Vous pourrez vous aider de la variable d’état global STATE, afin de savoir à quelle “étape” vous en êtes.
 Rhoban
Rhoban
 @RhobanRobots
@RhobanRobots