Un dé
L’objectif de ce tutoriel est d’implémenter l’algorithme de value iteration sur un exemple simple. voici le problème que nous allons résoudre:

- Garder le score du dé, le jeu se termine
- Relancer le dé, il perd alors un point
- Je lance le dé, j'obtiens 1, je décide de relancer
- Je lance le dé, j'obtiens 2, je décide de relancer
- Je lance le dé, j'obtiens 6, je décide d'arrêter
- Score final: (-1) + (-1) + 6 = 4
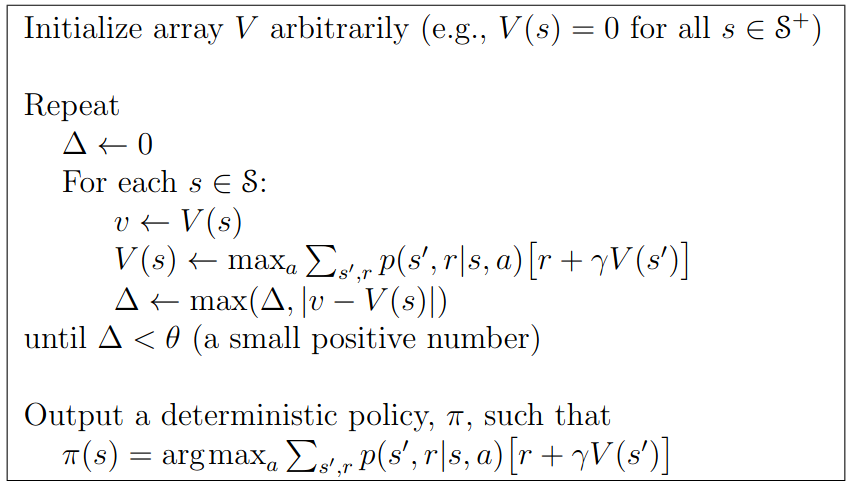
Nous allons implémenter l’algorithme suivant:
Représentation du jeu
On peut représenter ce jeu par le processus de décision markovien suivant:

Ici:
- les noeuds bleus sont des états (
s1 ... s6: les faces du dé,st: état terminal) - les noeuds rouges sont les actions possibles (
throw: lancer le dé,finish: terminer le jeu) - les arcs noirs sont les effets possibles d’une action, ils sont annotés de leur probabilité
- les arcs rouges sont les actions que l’on peut effectuer à partir d’un état, l’étiquette correspond à la récompense obtenue
En Python, on peut représenter les états par une liste de nombres, et le modèle par un dictionnaire:
states = range(7)
nonterminal_states = states[1:]
L’état 0 est l’état terminal, et les autres états correspondent au numéro indiqué sur le dé.
Nous avons ensuite besoin de représenter le modèle du jeu, c’est à dire \(p(s' | s, a)\), pour cela, on peut utiliser un dictionnaire
model = {}
for s in nonterminal_states:
model[s] = [
{
'name': 'terminate',
'reward': s,
'target': [[1., 0]]
},
{
'name': 'rethrow',
'reward': -1,
'target': [[1/6., t] for t in range(1,7)]
},
]
Ici, le modèle est une liste d’actions représentées par un nom, une récompense, et une distribution de probabilité sur les états cibles.
Algorithme de value iteration
On peut alors écrire l’algorithme de value iteration comme cela:
values = {s: 0 for s in states}
changed = True
while changed:
changed = False
for s in nonterminal_states:
possible_values = []
for a in model[s]:
value = a['reward']
for p, s_target in a['target']:
value = value + p * values[s_target]
possible_values.append(value)
new_value = max(possible_values)
if new_value != values[s]:
changed = True
values[s] = new_value
Ici, on itère sur tous les états, puis on cherche l’action ayant la meilleur valeur. Si cette valeur est différente de la valeur actuelle, on la met à jour. On continue jusqu’à ce qu’on ait fait une itération complète sur tous les états sans ayant mis à jour une seule valeur.
Politique optimale
Une fois l’algorithme de value iteration exécuté, on dispose de la fonction de valeur de la politique optimale. On peut à nouveau faire une passe sur les états pour lister toutes les actions qui correspondent à cette valeur:
for s in nonterminal_states:
print('== State %d, v=%f' % (s, values[s]))
for a in model[s]:
returns = a['reward']
for p, s_target in a['target']:
returns = returns + p * values[s_target]
if returns == values[s]:
print('- optimal action: %s' % a['name'])
On obtient alors:
== State 1, v=3.000000
- optimal action: rethrow
== State 2, v=3.000000
- optimal action: rethrow
== State 3, v=3.000000
- optimal action: terminate
- optimal action: rethrow
== State 4, v=4.000000
- optimal action: terminate
== State 5, v=5.000000
- optimal action: terminate
== State 6, v=6.000000
- optimal action: terminate
La stratégie optimale est de relancer le dé pour les valeurs 1 et 2, de terminer pour les valeurs 4, 5 et 6. Pour la valeur 3, les deux actions ont une espérance similaire.
 Rhoban
Rhoban
 @RhobanRobots
@RhobanRobots